Google Code Jam Archive — World Finals 2009 problems
Overview
In this final, onsite round, ACRush got into an early lead and managed to hold on to it until the very end, winning by a large margin of 81 points -- almost double the score of second place finisher, qizichao, with wata in close third.
The problem set was geometry-heavy, with three of the six problems requiring at least some computational geometry. Dynamic programming and probability made notable appearances as well.
Unusually, the round started with four different people solving four different problems (A, B, C and D). Most contestants quickly realized that E and F were much more difficult than the first four and left them to the end. ACRush ended up being the only one to solve problem F correctly. Vitaliy and dzhulgakov were the only two contestants to solve problem E and finished in 7th and 5th place respectively.
Cast
Problem A. Year of More Code Jam Written by Xiaomin Chen. Prepared by Ante Derek and Xiaomin Chen.
Problem B. Min Perimeter Written by Cosmin Negruseri. Prepared by Petr Mitrichev and Cosmin Negruseri.
Problem C. Doubly-sorted Grid Written by Evgeny Cherepanov. Prepared by Xiaomin Chen.
Problem D. Wi-fi Towers Written by Xiaomin Chen. Prepared by Xiaomin Chen, Tomek Czajka, and John Dethridge.
Problem E. Marbles Written by Cosmin Negruseri. Prepared Frank Chu and Ante Derek.
Problem F. Lights Written and prepared by Tomek Czajka.
Contest analysis presented by Xiaomin Chen, Tomek Czajka, John Dethridge, Igor Naverniouk, and Cosmin Negruseri.
Solutions and other problem preparation provided by Marius Andrei, Bartholomew Furrow, Derek Kisman, Fabio Moreira, and Igor Naverniouk.
A. Year of More Code Jam
Problem
A new year brings a new calendar, new challenges, and a lot of new fun in life. Some things, however, never change. There are still many great programming contests to be held, and our heroine Sphinny's passion for them remains unchanged.
There are several tournaments Sphinny is interested in. Each tournament will consist of a number of rounds. The organizer of each tournament has not decided on what date the tournament will start, but has decided how many rounds there will be in the tournament and how many days after the start date each round will be.
In some situations, two or more rounds (from different tournaments) can be scheduled on the same day. As Sphinny is so keen on problem solving, she will be happier if more rounds are scheduled on the same day. Her happiness value is computed as follows: for each day on which there are S rounds, her happiness will be increased by S2. Her happiness starts at 0 (don't worry — 0 is a happy place to start).
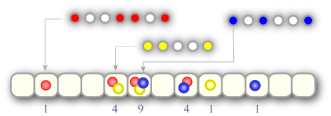
In the picture below there are three tournaments, each represented by a different color, and Sphinny's total happiness is 20. One tournament starts on the second day of the year, one starts on the fifth day of the year, and one starts on the sixth day of the year.
There are N days in the year. Each tournament will begin on any of the N days with equal probability. The big question for this year is what the expected value of Sphinny's happiness is.
As a perfectionist, she is not going to solve the problem approximately. Instead, she wants to know the result exactly. The number of tournaments is T, and there are NT equally likely ways to select the start dates of the tournaments. She is going to express her expected happiness as K+A/B, where K and B are positive integers and A is a non-negative integer less than B. If A is zero then B must be one, otherwise A and B must not have a common factor greater than one.
If a tournament starts late enough in the year, some of its rounds might be scheduled during the next year. Those rounds do not contribute to Sphinny's happiness this year.
Input
The first line of the input is a single integer C, the number of test cases. C tests follow. The first line of each test case is in the form
N Twhere N is the number of days in the year, and T is the number of tournaments. T lines then follow, one for each tournament, in the format
m d2 d3 ... dmindicating that there are m rounds, and the i-th round will be held on day di of the tournament. The first round of a tournament is held on day 1 (d1 = 1).
Output
For each test, output one line of the form
Case #X: K+A/Bwhere X is the case number, starting from 1, and K, A and B are as described above.
Limits
Time limit: 30 seconds per test set.
Memory limit: 1 GB.
1 ≤ C ≤ 50
1 ≤ N ≤ 109
2 ≤ m ≤ 50
1 < d2 < d3 < ... < dm ≤ 10000
Small dataset
1 ≤ T ≤ 2
Large dataset
1 ≤ T ≤ 50
Sample
2 1 1 2 2 4 2 3 2 4 2 3
Case #1: 1+0/1 Case #2: 5+1/8
B. Min Perimeter
Problem
You will be given a set of points with integer coordinates. You are asked to compute the smallest perimeter of a triangle with distinct vertexes from this set of points.
Input
The first line of the input data gives you the number of cases, T. T test cases follow. Each test case contains on the first line the integer n, the number of points in the set. n lines follow, each line containing two integer numbers xi, yi. These are the coordinates of the i-th point. There may not be more than one point at the same coordinates.
Output
For each test case, output:Case #X: Ywhere X is the number of the test case and Y is the minimum perimeter. Answers with a relative or absolute error of at most 10-5 will be considered correct. Degenerate triangles — triangles with zero area — are ok.
Limits
Memory limit: 1 GB.
0 <= xi, yi <= 109
Small dataset
Time limit: 60 seconds.3 <= n <= 10000
Large dataset
Time limit: 120 seconds.3 <= n <= 1000000
Sample
1 10 0 0 1 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9
Case #1: 5.656854
C. Doubly-sorted Grid
Problem
A rectangular grid with lower case English letters in each cell is called doubly sorted if in each row the letters are non-decreasing from the left to the right, and in each column the letters are non-decreasing from the top to the bottom. In the following examples, the first two grids are doubly sorted, while the other two are not:
abc ace aceg base def ade cdef base ghi bdg xxyy base
You are given a partially-filled grid, where some of the cells are filled with letters. Your task is to compute the number of ways you can fill the rest of the cells so that the resulting grid is doubly sorted. The answer might be a big number; you need to output the number of ways modulo 10007.
Input
The first line of input gives the number of test cases, T. T test cases follow. Each test case starts with a line containing two integers R and C, the number of rows and the number of columns respectively. This is followed by R lines, each containing a string of length C, giving the partially-filled grid. Each character in the grid is either a lower-case English letter, or '.', indicating that the cell is not filled yet.
Output
For each test case, output one line. That line should contain "Case #X: y", where X is the case number starting with 1, and y is the number of possible doubly-sorted grids, modulo 10007.
Limits
Memory limit: 1 GB.
1 ≤ T ≤ 40
Each character in the partially-filled grid is either '.' or a lower-case English letter.
Small dataset
Time limit: 60 seconds.
1 ≤ R, C ≤ 4
Large dataset
Time limit: 120 seconds.
1 ≤ R, C ≤ 10
Sample
3 2 2 ad c. 3 3 .a. a.z .z. 4 4 .... .g.. .cj. ....
Case #1: 23 Case #2: 7569 Case #3: 0
D. Wi-fi Towers
Problem
You are given a network of wireless towers. Each tower has a range and can send data to neighboring towers as long as the distance is less than or equal to the sending tower's range.
The towers are using an old communication protocol A, but there is a new, better protocol B available. We are thinking about upgrading some towers to send data using protocol B to achieve better bandwidth.
There is one important restriction: if a tower T is using the new protocol B, every tower within T's range must also be running protocol B, so that they can understand the data sent from T. The reverse is not necessary — towers running the new protocol B can be sent data from towers using the old protocol A.
Your task is to select the best set of towers to upgrade from protocol A to protocol B. There is some benefit to upgrading a tower, but there are also installation costs. So each tower will have a score, which can be positive or negative, which is the value of upgrading the tower. Choose the set of towers to upgrade in such a way that the total score of the upgraded towers is maximized.
Input
The first line contains the number of test cases, T. Each test case starts with the number of towers, n. The following n lines each contain 4 integers: x, y, r, s. They describe a tower at coordinates x, y having a range of r and a score (value of updating to the new protocol) of sOutput
For each test case, output:Case #X: scorewhere X is the test case number, starting from 1, and score is the total score for the best choice of towers.
Limits
Time limit: 30 seconds per test set.
Memory limit: 1 GB.
1 ≤ T ≤ 55
-10 000 ≤ x, y ≤ 10 000
1 ≤ r ≤ 20 000
-1000 ≤ s ≤ 1000
No two towers will have the same coordinates.
Small dataset
1 ≤ n ≤ 15
Large dataset
1 ≤ n ≤ 500
Sample
1 5 0 1 7 10 0 -1 7 10 5 0 1 -15 10 0 6 10 15 1 2 -20
Case #1: 5
E. Marbles
Problem
You have 2n marbles on a square grid. The marbles are colored in n different colors such that there are exactly 2 marbles of each color. The marbles are placed at the coordinates (1,0), (2,0), ..., (2n, 0).
Your task is to draw a path for each color that joins the two marbles of that color. Each path should be composed of vertical or horizontal line segments between grid points. No two paths can intersect or touch each other. No path may cross the y=0 line. Each path can only touch the y=0 line at the position of the two marbles it is connecting, so the first and last line segment of each path must be vertical.
Given an arrangement of marbles, return the minimum height of a solution, or return -1 if no solution exists. The height is defined as the difference between the highest and lowest Y-coordinates of the paths used.
An example:
red red blue yellow blue yellowOne solution would be:
+---+ +-----------+
| | | |
red red blue yellow blue yellow
| |
+-----------+
The minimum height is 2 in this case.
Input
The first line of input gives the number of cases, T. T test cases follow. The first line of each case contains n, the number of different colors for the marbles. The next line contains a string of 2n words separated by spaces which correspond to the colors of the marbles, in order from left to right. Each color is a string of lower case letters ('a' .. 'z') no longer than 10 characters. There will be exactly n different colors and each color will appear exactly twice.
Output
For each test case, output one line containing "Case #x: ", where x is the case number (starting from 1), followed by the height of any optimal solution, or -1 if no solution exists.
Limits
Memory limit: 1 GB.
1 <= T <= 50.
Small dataset
Time limit: 30 seconds.
1 <= n <= 20.
Large dataset
Time limit: 60 seconds.
1 <= n <= 500.
Sample
4 3 red red blue yellow blue yellow 3 red blue yellow red blue yellow 3 red blue yellow blue yellow red 3 red red blue blue yellow yellow
Case #1: 2 Case #2: -1 Case #3: 3 Case #4: 1
F. Lights
Problem
In a big, square room there are two point light sources: one is red and the other is green. There are also n circular pillars.
Light travels in straight lines and is absorbed by walls and pillars. The pillars therefore cast shadows: they do not let light through. There are places in the room where no light reaches (black), where only one of the two light sources reaches (red or green), and places where both lights reach (yellow). Compute the total area of each of the four colors in the room. Do not include the area of the pillars.
Input
- One line containing the number of test cases, T.
- One line containing the coordinates x, y of the red light source.
- One line containing the coordinates x, y of the green light source.
- One line containing the number of pillars n.
- n lines describing the pillars. Each contains 3 numbers x, y, r. The pillar is a disk with the center (x, y) and radius r.
Output
For each test case, output:
Case #X: black area red area green area yellow areawhere X is the test case number, starting from 1, and each area is a real number.
Any answer with absolute or relative error of at most 10-5 will be accepted.
Limits
Memory limit: 1 GB.
All input numbers are integers.
1 ≤ T ≤ 15
0 ≤ x, y ≤ 100
1 ≤ r ≤ 49
Small dataset
Time limit: 20 seconds.
0 ≤ n ≤ 1
Large dataset
Time limit: 90 seconds.
0 ≤ n ≤ 50
Sample
1 5 50 95 50 1 50 50 10
Case #1: 0.7656121 1437.986 1437.986 6809.104
Analysis — A. Year of More Code Jam
The setting of this problem is no doubt discrete probability. From the definition, the space consists of NT equally likely possible outcomes. That can be, under our limits, as huge as 10450. Clearly, a naive approach is not feasible.
But let us do a little exercise in probability. Define the random variable Xi to be the number of contests on the i-th day, the quantity we want to compute is the average of Xi2, i.e., the expectation Ε(∑ Xi2). By the linearity of the expectation, we have
Ε(∑1≤i≤N Xi2) = ∑1≤i≤N Ε(Xi2).So let us focus on the computation of the variable for a fixed day for the moment. Pick any i, and let X := Xi. Let us define more random variables. Define Yj to be the indicator of whether the j-th tournament will have a contest on the i-th day. Clearly, X = ∑j Yj. So,
(*) Ε(X2) = Ε((∑1≤j≤T Yj)2) = ∑1≤j≤T Ε(Yj2) + 2 ∑1≤j<k≤T Ε(YjYk).We observe that each terms in the last expression is easy to compute. Being the indicator random variables, the Y's take value 0 or 1. So
- Yj2 always has the same value as Yj, and its expectation is just the probability that Yj is 1, i.e., tournament j has a contest on day i.
- YjYk is 1 if and only if both Yj and Yk are 1. The expectation is the probability that both the j-th and the k-th tournament has a contest on day i.
So far we addressed the problem just for a single day i. We need to do this for every i. There are 109 of them. But notice that, as long as there is no input dt = i, D(i-1, j) = D(i, j) for all j. This means that the expectation for the i-th day is the same as the expectation for the (i-1)-th. There are at most T max(M) ≤ 2500 such d's in the input, so we need to compute (*) for at most 2500 days. For our problem, it is good enough to realize that there is no d > 10000. So all the expectations after the 10000-th day are the same. We can just do the computation for the first 10000 days, and for the rest, a simple multiplication.
The last problem is the need for big integers. At the first glance we might have both numerators and denominators as big as 10450. But that is not the truth. Simply observe the above answer, which is a sum of various D(i,j) / N and D(i,j)D(i,k) / N2. We actually proved that the denominator is never bigger than N2. A careful implementation with 64-bit integers will be good enough.
For a further speed-up. The formula in (*) involves computing O(T2) terms. But if we do it from day 1, keep D(i,j) for each j and two more variables -- S1 for the sum of all the D(i,j)'s, and S2 for the sum of D(i,j)2's, then we just need constant update time when we see an input d, and also constant computation time for each day we want to compute (*).
Analysis — B. Min Perimeter
This problem is similar to the classical problem of finding the closest pair in a set of points. Algorithms that solve the closest-pair problem can be adapted to solve this one.
The number of points can be pretty large so we need an efficient algorithm. We can solve the problem in O(n log n) time using divide and conquer. We will split the set of points by a vertical line into two sets of equal size. There are now three cases for the minimum-perimeter triangle: its three points can either be entirely in the left set, entirely in the right set, or it can use points from each half.
We find the minimum perimeters for the left and right sets using recursion. Let the smallest of those perimeters be p. We can use p to make finding the minimum perimeter of the third case efficient, by only considering triangles that could have an area less than p.
To find the minimum perimeter for the third case (if it is less than p) we select the points that are within a distance of p/2 from the vertical separation line. Then we iterate through those points from top to bottom, and maintain a list of all the points in a box of size p x p/2, with the bottom edge of the box at the most recently considered point. As we add each point to the box, we compute the perimeter of all triangles using that point and each pair of points in the box. (We could exclude triangles entirely to the left or right of the dividing line, since those have already been considered.)
We can prove that the number of points in the box is at most 16, so we only need to consider at most a small constant number of triangles for each point.
Splitting the current set of points by a vertical line requires the points to be sorted by x and going through the points vertically requires having the points sorted by y. If we do the y sort at each step that gives us an O(n log2 n) algorithm, but we can keep the set of points twice, one array would have the points sorted by x and one would have the points sorted by y, and this way we have an O(n log n) algorithm.
The time limits were a bit tight and input limits were large because some O(n2) algorithms work really well on random cases. This is why during the contest some solutions that had the right idea but used a p x p box size or sorted by y at each step didn't manage to solve the large test cases fast enough.
You can read Tomek Czajka's source to get the details of a good implementation:
#include <algorithm>
#include <cassert>
#include <cmath>
#include <cstdio>
#include <cstdlib>
#include <vector>
using namespace std;
#define REP(i,n) for(int i=0;i<(n);++i)
template<class T> inline int size(const T&c) { return c.size();}
const int BILLION = 1000000000;
const double INF = 1e20;
typedef long long LL;
struct Point {
int x,y;
Point() {}
Point(int x,int y):x(x),y(y) {}
};
inline Point middle(const Point &a, const Point &b) {
return Point((a.x+b.x)/2, (a.y+b.y)/2);
}
struct CmpX {
inline bool operator()(const Point &a, const Point &b) {
if(a.x != b.x) return a.x < b.x;
return a.y < b.y;
}
} cmpx;
struct CmpY {
inline bool operator()(const Point &a, const Point &b) {
if(a.y != b.y) return a.y < b.y;
return a.x < b.x;
}
} cmpy;
inline LL sqr(int x) { return LL(x) * LL(x); }
inline double dist(const Point &a, const Point &b) {
return sqrt(double(sqr(a.x-b.x) + sqr(a.y-b.y)));
}
inline double perimeter(const Point &a,
const Point &b,
const Point &c) {
return dist(a,b) + dist(b,c) + dist(c,a);
}
double calc(int n, const Point points[],
const vector<Point> &pointsByY) {
if(n<3) return INF;
int left = n/2;
int right = n-left;
Point split = middle(points[left-1], points[left]);
vector<Point> pointsByYLeft, pointsByYRight;
pointsByYLeft.reserve(left);
pointsByYRight.reserve(right);
REP(i,n) {
if(cmpx(pointsByY[i], split))
pointsByYLeft.push_back(pointsByY[i]);
else
pointsByYRight.push_back(pointsByY[i]);
}
double res = INF;
res = min(res, calc(left, points, pointsByYLeft));
res = min(res, calc(right, points+left, pointsByYRight));
static vector<Point> closeToTheLine;
int margin = (res > INF/2) ? 2*BILLION : int(res/2);
closeToTheLine.clear();
closeToTheLine.reserve(n);
int start = 0;
for(int i=0;i<n;++i) {
Point p = pointsByY[i];
if(abs(p.x - split.x) > margin) continue;
while(start < size(closeToTheLine) &&
p.y - closeToTheLine[start].y > margin) ++start;
for(int i=start;i<size(closeToTheLine);++i) {
for(int j=i+1;j<size(closeToTheLine);++j) {
res = min(res, perimeter(p, closeToTheLine[i],
closeToTheLine[j]));
}
}
closeToTheLine.push_back(p);
}
return res;
}
double calc(vector<Point> &points) {
sort(points.begin(), points.end(), cmpx);
vector<Point> pointsByY = points;
sort(pointsByY.begin(), pointsByY.end(), cmpy);
return calc(size(points), &points[0], pointsByY);
}
int main() {
assert(0==system("cat > Input.java"));
fprintf(stderr, "Compiling generator\n");
assert(0==system("javac Input.java"));
fprintf(stderr, "Running generator\n");
assert(0==system("java -Xmx512M Input > input.tmp"));
fprintf(stderr, "Solving\n");
FILE *f = fopen("input.tmp", "r");
int ntc; fscanf(f, "%d", &ntc);
REP(tc,ntc) {
int n; fscanf(f, "%d", &n);
vector<Point> points;
points.reserve(n);
REP(i,n) {
int x,y; fscanf(f, "%d%d", &x, &y);
points.push_back(Point(2*x-BILLION,2*y-BILLION));
}
double res = calc(points);
printf("Case #%d: %.15e\n", tc+1, res/2);
}
fclose(f);
}
Analysis — C. Doubly-sorted Grid
A counting problem, with a board size not too big. The problem gives a quick impression of dynamic programming on a space of exponentially many states. And it is indeed so.
By the limits of this problem, let us say the size is the larger of m and n. A solution with 22⋅size states is fine, while a solution with 24⋅size states is probably only good for the small dataset. However, for regular programming contest goers, there are many conventional ways to define the states for similar grid problems that fall into the latter category.
So, the key part of the problem is to find the right state space. Once it is found, the finalists can no doubt carry out the dynamic programming solution easily.
The basic picture is the lattice paths. Specifically, let us consider, in a doubly sorted grid, all the letters less than or equal to a particular character. They form an upwards closed region towards the top-left corner. In other words, if the letter in (r, c) is no greater than the prescribed character, so is the letter in (r', c'), if r' ≤ r and c' ≤ c. As a result, the boundary separating this region and the rest of the grid forms a lattice path from the bottom-left to the top-right, and can only go north or east. This is a well known subject -- there are (m+n choose m) such paths in total. Let us call them monotone paths. For two monotone paths, we say one dominates the other if one never goes above the other. Any doubly sorted grid corresponds in a one to one fashion to 26 monotone paths (some of which may be identical), one for each letter, and the path for a bigger letter dominates the paths for the smaller letters. The left picture below depicts the situation when there are three letters; and the monotone boundaries for 'a' and 'b' are highlighted.
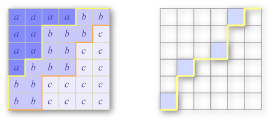
Just one step further. Let us focus not only the exact boundary for a letter but any monotone path. For any monotone path P and any letter c, define
dp[P][c] := the number of ways one can fill all the squares above the path P, using only the letters no greater than c, so that the upper part is doubly sorted, and any pre-filled letter in the upper part is respected.
For any monotone path except the most dominated one, we have one or more maximal points, those are the points where the path goes east then followed by a step upwards. In the second picture above, we highlight a monotone path with its maximal points colored. To compute dp[P][c], we can divide the situation into two cases. (1) The letter c does not appear at all. There are dp[P][c-1] ways to do so. (2) Otherwise, c must appear in at least one of the maximal points of P. For each non-empty subset of the maximal points, we can assign the letter c to them, reducing our task to dp[P'][c], where P' is a path that only differs from P in that subset of maximal points. We use inclusion-exclusion formula on all the non-empty subsets to compute the contribution to dp[P][c] in this case.
Such a solution is relatively intuitive, and is fast enough under our constraints. By adding one more helper, one can find a faster solution. Now let us refine
dp[P][c][k] := the number of ways one can fill all the squares above the path P, using only the letters no greater than c, and the letter c does not occur anywhere after column k,so that the upper part is doubly sorted, and any pre-filled letter in the upper part is respected.We leave the implementation details as an easy exercise for interested readers. We mention that, when m=n, the number of states is 26⋅(2n choose n)⋅n = Θ(4nn0.5). Although the computation of a single dp[P][c][k] may involve up to n steps, the running time can be shown as Θ(4nn0.5) by a simple amortized analysis -- for fixed P and c, we need O(n) steps in total to compute the table for all k.
Analysis — D. Wi-fi Towers
Connection graph
We start by representing the problem as a graph problem. Each tower is a vertex in the graph and has a weight equal to its score. If a tower A has another tower B in its range, we represent this fact as a directed edge from A to B. The problem is to choose a set of vertices with maximum weight such that for every edge from A to B, if A is chosen then B is also chosen. In the following, we assume the number of towers (vertices) is V and the number of edges is E.
Reduce to an instance of MIN-CUT
To reduce the problem to an instance of MIN-CUT, we create a flow network as follows. Create a source vertex, a sink vertex, and one vertex for each tower. Suppose a tower has score s. If s > 0, create an edge from the vertex to the sink with capacity s. If s < 0, create an edge from the source to this vertex with capacity |s|. Finally, for every edge in the connection graph, create a similar edge in the flow network with infinite capacity. The network has V + 2 = O(V) vertices and O(V + E) edges.
Now every finite cut in the graph represents a choice of towers - we choose every tower on the same side of the cut as the source. The infinite capacity edges enforce that the choice follows the given constraints (otherwise we get a cut of infinite weight). The edges from the source and to the sink penalize the solution appropriately for choosing towers with negative scores and for not choosing towers with positive scores. If the value of the best cut is C, the answer is S - C, where S is the sum of positive tower scores.
Solving MIN-CUT
By the max-flow min-cut theorem, we can solve the MIN-CUT instance generated above by computing the maximum flow in the same graph. To compute the maximum flow, we can use the Edmonds-Karp algorithm (a variant of Ford-Fulkerson which selects augmenting paths using BFS), which results in complexity bounded by O(V(V+E)2) = O(V5). In practice, this was fast enough to solve all possible test cases.
One could also use a more complicated push-relabel max-flow algorithm which, with a FIFO vertex selection rule, results in complexity O(V3).
Yet another algorithm, thanks to integral capacities, is the capacity scaling variant of Ford-Fulkerson (start by searching for augmenting paths with weights being large powers of 2 first, and then decrease). This results in O((V+E)2 log F) = O(V4 log F) where F is the maximum value of the flow.
Reducing the number of edges
Finally, there is a geometric trick using which we can reduce the number of edges E to O(V), thus reducing the complexity of the algorithms above. The complexity of Edmonds-Karp becomes O(V3) and of capacity scaling: O(V2 log F).
First, notice that we can remove edges without changing the final answer as long as the transitive closure of the graph stays the same.
The crucial trick is to see that if there are two directed edges A-C and B-C, and the angle ACB is smaller than 60 degrees, then we can remove the longer edge. Suppose A-C is longer than B-C. Then if we remove the edge A-C, there is still going to be an indirect connection A-B-C (using shorter or equal length edges), thanks to the fact that the range of A is a circle.
If we keep doing this, every vertex will end up with at most 6 incoming edges, thus reducing the total number of edges to at most 6V.
More information
This problem is also equivalent to the Minimum Closure Problem, which was studied in the 1970s and has applications in the mining industry.
Analysis — E. Marbles
Last year we were trying to solve different instances of this problem. It took a long time to converge to this particular shape, and even after we settled on the current requirements, we were still tweaking the input limits at 2am the night before the contest to make the problem a bit more interesting. The problem nicely combines together dynamic programming, greedy and graph related notions like biconnected components and trees.
The first step is deciding if a particular configuration is or isn't solvable. If for two colors their corresponding marbles alternate it means that the two pairs of marbles need to be joined by curves on opposite sides of the horizontal line Y=0. We can build a graph where the nodes represent pairs of same-color marbles and form a graph with edges between pairs of marbles that alternate. We can draw the paths with no intersection if and only if this graph is bipartite.
Next, for solvable configurations we compute the minimum height. The pairs graph can have many connected components, and for each such component we can choose two ways of drawing the lines (with the first pair of marbles above the Y=0 line or below it), so in total we would have O(2components) configurations. This idea can solve the small case but is too time consuming for the large case.
Solving the large case requires us to use dynamic programming. Our state will be defined by left, right, height_up and height_down. For each state we compute a boolean value which tells us if the subproblem which uses the set of marbles with indexes from left to right can be solved in the vertical range [-height_down .. height_up]. Computing this value is a bit tricky, what we need to notice is that we can try each of the two ways of drawing the component that starts at index left. Then an important observation is that we can draw each path with the maximum height possible if the line is above the X axis or maximum depth possible if the line is below the X axis as long as our drawing is within the [-height_down .. height_up] vertical range. Using these ideas we can come up with an O(n5) algorithm.
We can improve on this solution by using the state (left, right, height_up) and for each state finding the smallest height_down for which the subproblem [left .. right] is solvable. Now we notice that we should use dynamic programming on pairs of left and right where connected components of marbles start and finish. This will make right uniquely defined by left. Thus we have reduced the state space to O(n2) states. We also notice that the connected components form a tree-like structure where we need to solve the innermost components first and then solve outer components, much like visiting the leaves of a tree first and getting closer and closer to the root. Now each connected component will be analyzed just once at an upper component level so the overall algorithm will take O(n2) time.
Here's Tomek Czajka's solution:
#include <algorithm>
#include <cassert>
#include <cstdio>
#include <map>
#include <string>
#include <vector>
using namespace std;
#define REP(i,n) for(int i=0;i<(n);++i)
template<class T> inline int size(const T&c) { return c.size();}
const int INF = 1000000000;
int n; // number of types of marbles
vector<vector<int> > where; // [n][2]
vector<int> marbles; // [2*n]
void readInput() {
char buf[30];
map<string,int> dict;
scanf("%d", &n);
marbles.clear(); marbles.reserve(2*n);
where.clear(); where.resize(n);
for(int i=0;i<2*n;++i) {
scanf("%s",buf);
string s = buf;
map<string,int>::iterator it = dict.find(s);
int m;
if(it==dict.end()) {
m = size(dict);
dict[s] = m;
} else {
m = it->second;
}
marbles.push_back(m);
where[m].push_back(i);
}
}
struct Event {
int x,t;
// t=0 start top, 1 end top
// t=2 start bot, 3 end bot
};
vector<int> vis;
bool cross(int m1,int m2) {
return
where[m1][0] < where[m2][0] &&
where[m2][0] < where[m1][1] &&
where[m1][1] < where[m2][1] ||
where[m2][0] < where[m1][0] &&
where[m1][0] < where[m2][1] &&
where[m2][1] < where[m1][1];
}
void dfs(int m,int sign) {
if(vis[m]==sign) return;
if(vis[m]==-sign) throw 0;
vis[m]=sign;
REP(i,n) if(i!=m && cross(m,i)) dfs(i,-sign);
}
vector<vector<Event> > cacheCalcEvents;
const vector<Event> &calcEvents(int startx) {
vector<Event> &res = cacheCalcEvents[startx];
if(!res.empty()) return res;
vis.assign(n,0);
dfs(marbles[startx],1);
REP(x,2*n) {
int m = marbles[x];
if(vis[m]==0) continue;
int nr=0;
if(where[m][nr] != x) ++nr;
assert(where[m][nr]==x);
Event e; e.x=x;
e.t = (1-vis[m]) + nr;
res.push_back(e);
}
return res;
}
vector<vector<int> > cacheCalcH2;
int calcH2(int a,int b,int h1) {
if(h1<0) return INF;
if(a==b) return 0;
int &res = cacheCalcH2[a][h1];
if(res!=-1) return res;
const vector<Event> &events = calcEvents(a);
res = INF;
for(int mask = 0; mask<=2; mask+=2) {
int top=0, bot=0;
int h2 = 0;
REP(i,size(events)+1) {
int alpha = i==0 ? a : events[i-1].x + 1;
int beta = i==size(events) ? b : events[i].x;
h2 = max(h2, calcH2(alpha, beta, h1 - top) + bot);
if(i!=size(events)) {
switch(events[i].t ^ mask) {
case 0: ++top; break;
case 1: --top; break;
case 2: ++bot; break;
case 3: --bot; break;
}
}
}
res = min(res, h2);
}
return res;
}
int solve() {
int res = INF;
cacheCalcH2.assign(2*n, vector<int>(n+1,-1));
cacheCalcEvents.clear(); cacheCalcEvents.resize(2*n);
try {
REP(h1,n+1) {
res = min(res, h1 + calcH2(0,2*n,h1));
}
return res;
} catch(int) { return INF; }
}
int main() {
int ntc; scanf("%d", &ntc);
REP(tc,ntc) {
readInput();
int res = solve();
if(res==INF) res = -1;
printf("Case #%d: %d\n", tc+1, res);
}
}
Analysis — F. Lights
There are various ways to solve this problem. The solutions can be split into two kinds of approaches. One way is to solve the problem exactly (or, to arbitrary precision), the other is to approximate the answer with high enough precision. The exact solutions generally try to divide the square into subareas of the same color, compute the area of each subarea separately, and add up the totals for each color. We discuss these first.
Intersection of (mostly) triangles
First, consider just one light. We want to compute the total area illuminated by the light. To do that, compute the tangent lines from the light to each pillar, and lines from the light to each corner of the room, and consider each "cone" between two adjacent lines separately. Each cone will either end up hitting a wall, or hitting a pillar. In the first case we get a triangle, whose area we can easily compute. In the second case we get a "quasi-triangle", that is, a triangle minus a disk segment. Here, we need to subtract the area of the disk segment. We can compute the area of a disk segment by subtracting a triangle from the area of a disk sector (a "pie slice").
Once we have the total area covered by each light, we need one more thing: the area covered by both lights. We can take each pair of triangles or quasi-triangles generated in the previous step, and compute the common area between them. Now we need to compute the area of the intersection of two triangles or quasi-triangles.
A simple way to approach this is to first treat quasi-triangles as triangles (include the disk segment). Now we compute the intersection between the two triangles, which gives us a polygon (up to six sides). If one or both of the triangles were actual triangles, or when the pillars subtracted from the two quasi-triangles were different, the polygon is the correct answer - there is no need to account for the subtracted disk segments, because each segment is outside the other triangle anyway.
The only nasty case comes up when we have two quasi-triangles ending at the same pillar. In that case, we first compute the intersection polygon, and then we subtract the pillar from the polygon. To do that, remove those edges and parts of edges of the polygon that fall inside the circle and replace them with one edge. The answer will be the area of the reduced polygon, again minus a disk sector cut off by a line, which we already know how to compute.
Line sweeping
Line sweeping is a common technique in computational geometry. We sweep a vertical line from the left edge to the right. As in the solution above, the interesting rays are the tangent rays from lights to circles. The interesting moments are when the x-coordinate of the vertical line reaches one of the following. (1) A light. (2) A pillar starts or ends. (3) An interesting ray touches or intersects a circle, or hits the wall. (4) Two interesting rays intersect.
Now, let x1 < x2 be two adjacent interesting moments. The vertical strip between x1 and x2 is divided into pieces. Each piece is bounded above and below by a general segment -- a line segment or an arc. By the definition of the interesting moments, nothing interesting will happen in the middle, and each piece is of one color. So we can sample an arbitrary point from each piece to decide the color. The pieces are not convex, but this is not a problem -- they are convex on any vertical line so we can easily find a point that is inside each piece. The area of each piece is also easy to compute -- it is basically a trapezoid, possibly degenerating into a triangle if the upper and lower boundaries meet at one end, and one needs to subtract a disk segment for each arc-boundary.
Line sweeping is often used with nice data structures to achieve good complexity. But that is not our primary concern here. We used it for the simplicity of the implementation -- the only geometric operations needed here are intersections between lines and circles.
Approximations
The problem requires a relative or absolute error of at most 10-5, while the total room area is 10000. Cases requiring the most care are those when one of the four colors has an area less than 1, in which case the error we can make relative to the area of the whole room is 10-9.
The simplest approach would be to sample a lot of points either randomly, or in a regular grid, compute the color of each sample and assume that the sample is representative of the correct answer. The above error estimation suggests though that to get enough precision, we would need to sample on the order of 109 points (or more, due to random deviations). This is too much for a solution to run within the time limit. A smarter approach is needed.
Computing the area can be seen as a problem of computing a two-dimensional integral. A hybrid approach is also possible: we can see it as a one-dimensional integral along the x coordinate, and for each x coordinate we sample we can compute the exact answer by looking at which segment of the vertical line is in what color. This one-dimensional sub-problem is somewhat simpler to do than solving the full two-dimenstional problem exactly.
In either case, whether we compute a two-dimensional integral or just a one-dimensional one for a more complex function, we need a smart way to approximate the integral. Uniform or random sampling is not enough.
You can search the web for methods of numerical integration. In this problem, an adaptive algorithm is needed, which means that we sample more "interesting" areas with more samples than the less "interesting" ones. "Interesting" can be defined as "large changes in values" (large first derivative) or "wild changes in values" (large second derivative).
One simple algorithm is to write the integration procedure as a recursive function. We recursively try splitting the interval into smaller ones, and see how much the answer changes through such increases of precision. We stop the recursion when the answer changes very little, which means the interval is small enough or the function is smooth enough in the interval. This will result in sampling the more "interesting" areas more accurately.